
The ditch under the ground opens a whole new world, especially when this floor is on other planets. If you go under the top regolith in a world like Mars, he could give access to a world with life, while this could lead to discovering a water source on the moon. For almost 30 years, scientists have been developing robots based on this best-known grave machine here on the ground and mole. Unfortunately, the models that have so far made it into space have failed for various reasons, but that has no longer prevented research groups from perfecting their own version of a mole robot. A work of a research group at Guangdong University of Technology in China describes its efforts and frustrations to imitate one of the more unique but more capable specialists in nature.
The failure was not always their fault to be fair the development teams who work on earlier versions of “Mole” robots. The Pluto robot (Planetary Under Victim Face Tool) was adapted to Mars Express and had a hemonial mechanism that could not be seen in nature. It made it to Mars, but was not successfully tested because the Beagle 2 Lander that Mars Express was attached not to use its solar collectors properly, and the mission ended before it began.
Insight, another mission to Mars, wore another probe with a similar mission. The Heat Flow- and Physical Properties Package (HP3) probe was designed so that it reaches down 5 m into the Maritian soil and measures the heat from the inside of Mars. Unfortunately, it encountered unexpected soil conditions and could not dig as intended – as we reported extensively. After several failed attempts, this part of the mission was finally given up.
https://www.youtube.com/watch?v=penKy5Uyeyq
Moles are frequent inspiration for robotics design, as described in this video by Kaist Robotics Lab.
Credit – Kaist Urban Robotics Lab YouTube Channel
In other words, it is difficult to dig on other worlds. But the team in Guangdong did not stop that from trying it. Your robot should be much more similar to an actual mole than HP3 or Pluto. The existing missions used both forms of drilling techniques, while the new robot uses actions to imitate the actual moles.
There are two types of trench movements used by different types of mol. The first and the most frequently shown in the media shoveling of dirt from before them by using their massive forearms. Another less well -known method is to bite your huge teeth on the dirt and push your arms under her.
We know that because grave behavior was made in the cinematics of the mole. These reviews showed how important the front and hind legs moved for mobility and dirt around the body of the mole.
Mole robots dig step by step.
Credit – Zhang et al.
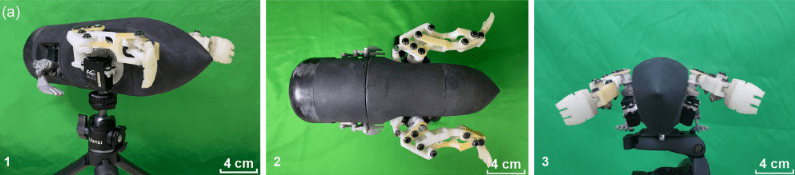
Understanding the kinematics is only the first step, and the team from Guangdong has taken the next step in building a prototype that, admittedly, looks like a mole, although maybe not a sweet and cuddling. It has different forearms and hind legs, and his head is shaped like that of a mole, although in view of his lack of eyes it looks almost more like a mussel case. Advanced electronics, power supply systems and engines are hidden in the robot's body, so that it imitates the overall form of a mole in more detail.
In order to test their prototype, the researchers made a bed of plastic particles to simulate the size that the robot in moon or Mars Regolith would expect. The robot has successfully dug into the particles. However, it had difficulty moving forward and creating the types of tunnels for which moles are famous. This seemed to be due to a more complex coordination between the forearms and the hind legs, which was modeled in the current iteration of the prototype.
This first prototype is a step towards a more complete model that could one day use in another world. Future research would include the development of techniques so that they enable the dig, crawl, racing and even swimming, so that the movement of this bot becomes real as the paper describes it. It may be difficult to find another world outside of the earth that needs all of these skills, but if the biomimetic design improves, they expect more bots such as cozy and furry things at home to explore new worlds.
Learn more:
Zhang et al
Ut – NASA has given up to provide the mole from Insights
UT – it looks like it is working! The NASA Insight mole makes progress again thanks to the ARM Scoop Hacks
Ut – insights 'mole' is now completely buried!
Lead picture:
Different orientations of the MOL robot prototype.
Credit – Zhang et al.
Like this:
Load…
Comments are closed.